

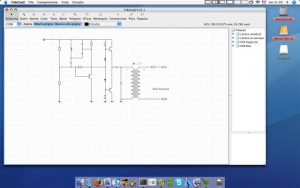
FidoCadJ 电气原理图绘制工具
FidoCadJ 是一个采用Java开发的电气原理图绘制工具,简单、易于使用。绘制的图形可以导出多种格式:PDF、EPS、PGF for LaTeX、SVG、PNG 和 JPEG等等。

2015_Face_Detection CVPR2015 Cascade CNNs for Face Detection
Cascade CNNs for Face Detection The main idea is from 2015 CVPR Cascade CNNs for Face Detection.(L.Hao,Z.Lin etc.) In the "master" branch, I include the code for training...

2015_Face_Detection CVPR2015 Cascade CNNs for Face Detection
Cascade CNNs for Face DetectionThe main idea is from 2015 CVPR Cascade CNNs for Face Detection.(L.Hao,Z.Lin etc.)In the 'master' branch, I include the code for training. And in the...

KityFormula 公式编辑器
Kity Formula 为您提供公式表达式解析,可视化公式编辑,公式完美展示于一身的web端的整体解决方案。 KityFormula 包括:KityFormula-editor,KityFormula-parser 和 KityFormula-render。 简单...
iD OpenStreetMap 地图数据编辑器
iD 编辑器是 OpenStreetMap (OSM) 社区中一款非常受欢迎的在线地图数据编辑器。它以其易用性和友好的用户界面而闻名,特别适合刚接触地图编辑的用户快速上手,...
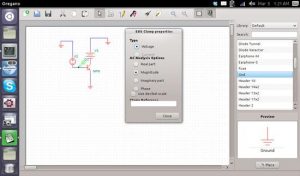
oregano 模拟电路设计工具
oregano 是 GNOME 下的一款模拟电路设计工具。该工具依赖于 libgtksourceview3.0, goocanvas-2.0 和 libxml2 来运行。
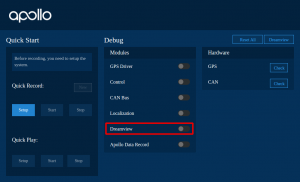
ApolloAuto 开源自动驾驶平台
Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 Apollo 是百度重点打造的 AI 开放平台...

GDAL 地理数据格式操作库
GDAL是一个操作各种栅格地理数据格式的库。包括读取、写入、转换、处理各种栅格数据格式(有些特定的格式对一些操作如写入等不支持)。它使用了一个单一的抽象数据模型就支持了大多数的栅格数据...

Pottslab
Pottslab Pottslab is a Matlab/Java toolbox for the reconstruction of jump-sparse signals and images using the Potts model (also known as "piecewise constant Mumford-Shah model...
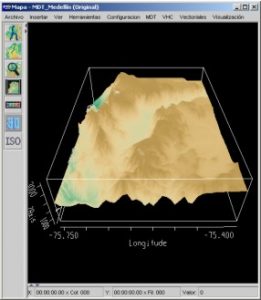
HidroSIG 地理信息系统
HidroSIG是一个地理信息系统,它支持物理光栅和垂直图,带有面向模块的水文学分析,时间序列,遥感,等等。它完全是用Java开发的,使用VisAD 作为它的图形库,使用MySQL 作为其数据库管理系统。
GAP system 离散代数开发库
GAP 是 Groups、Algorithms、 Programming 的首字母简称,是一个计算离散代数的系统,特别强调计算群理论,主要用于研究组及其表示、环、向量空间、代数、组合结构等。 GAP 开发库提...
