一、 概述
机器人是靠自身动力和控制能力来实现各种功能的一种机器。
本文将人工智能"机器人"基础知识整理为思维导图,便于回顾和记忆。
二、 重点内容
- 机器人分类
- 工业机器人
- 服务机器人
- 一般机器人
- 智能机器人
三、 思维导图

四、 重点知识笔记
机器人是靠自身动力和控制能力来实现各种功能的一种机器。
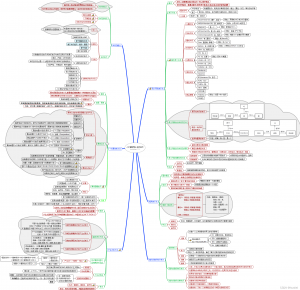
机器人分类
- 国际通用机器人分类
- 工业机器人
- 焊接机器人
- 搬运机器人
- 装配机器人
- 处理机器人
- 喷涂机器人
- 服务机器人
- 专业领域服务机器人
- 场地机器人
- 专业清洁机器人
- 医疗服务机器人
- 物流用途机器人
- 水下机器人
- 军用机器人
- 救灾和安全机器人
- 个人/家庭服务机器人
- 家务机器人(扫地机器人、擦玻璃机器人)
- 家庭休闲机器人
- 迎宾机器人
- 住宅安全和监视机器人
- 专业领域服务机器人
- 工业机器人
- 按智能程度的差异分类
- 一般机器人:不具有智能,只具有一般编程能力和操作功能的机器人
- 智能机器人
- 按功能分类
- 传感机器人
- 自主型机器人
- 交互型机器人
- 按智能程度分类
- 工业机器人
- 初级智能机器人
- 高级智能机器人
- 按照形态分类
- 仿人智能机器人
- 拟物智能机器人
- 按功能分类
- 其他分类
- 微型机器人
- 群体机器人
- 软体机器人
- 人形机器人
- 太空机器人
- 水下机器人
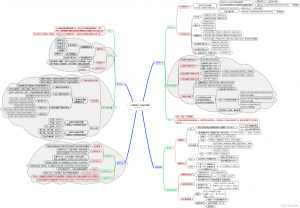
工业机器人
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。
工业机器人发展的3个阶段:
第一代:可编程的工业机器人
属于“示教再现”型机器人
- 首先由操作者将完成作业所需要的各种知识,通过直接或间接手段对工业机器人进行“示教”
- 运动轨迹
- 作业条件
- 作业顺序
- 作业时间等
- 工业机器人在一定的精度范围内,忠实地重复“再现”各种被示教的动作。
第二代:有感觉的机器人
- 通过传感器获得机器人作业环境和作业对象的部分相关信息
- 视觉传感器
- 非视觉传感器
- 力觉
- 触觉
- 听觉等
- 将得到的信息经过计算机处理后,用于控制机器人完成相应的操作
第三代:具有逻辑思维、判断和决策能力
- 具有比第二代机器人更加完善的环境感知能力
- 具有逻辑思维、判断和决策能力
- 可根据作业要求与环境信息自主地进行工作
目前,工业机器人应用最为广泛(约占70%~80%),其中应用最广泛的是机械臂。
2015年ABB开发的YuMi,拥有人体尺寸和人类肢体动作,能够与人类进行近距离协作。
服务机器人
服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从事生产的设备。应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。
服务机器人的技术含量相对较高,包括视觉识别、协同作业、导航避障、柔性抓取等等。
服务机器人涉及的主要技术:
- 导航定位(SLAM定位和地图构建)
- 各类传感器
- 激光雷达
- 毫米波雷达
- 光学相机
- GPS
- 超声波传感器
- 陀螺仪
- 运动控制(液压控制/电机控制)
- 手臂肢体
- 控制传感器
- 伺服舵机
- 减速器
- AI芯片
- 人机交互(人工智能技术)
- 语音识别
- 语义理解
- 图像识别
- 深度学习
- 基础计算
服务机器人产业链
- 上游(零部件)
- 芯片
- 舵机
- 减速器
- 各类传感器
- 电源
- 摄像头
- 存储器
- 中游(系统集成、本体制造)
- 图像识别
- 语音识别
- 语义识别
- 操作系统
- 设计、研发、加工、组装等
- 下游
- 个人/家庭服务机器人
- 专业服务机器人
一般机器人
一般机器人通常是指不具有智能、只具有一般编程能力和操作功能的机器人。
通常情况下,一般的机器人系统包括:
- 机械系统
- 驱动系统:各种机械部件产生运动的装置,按照控制系统发出的指令信号,借助动力元件使机器人进行一系列动作。
- 控制系统:控制系统是工业机器人的神经中枢,它由计算机硬件、软件和一些专用电路构成。
- 感知系统:由传感器组成,可获取内部和外部环境中的有用信息。
- 机器人-环境交互系统:实现机器人与外部环境设备相互联系和协调的系统。
- 人机交互系统:使操作人员参与机器人控制并与机器人进行连续互动的装置。
智能机器人
智能机器人要具备的主要要素:
- 一是感觉要素,用来认识周围环境的状态;
- 能感知视觉、接近、距离等的非接触型传感器
- 能感知力、压觉、触觉等的接触型传感器
- 二是运动要素,用来对外界做出反应性动作;
- 位置控制
- 力度控制
- 位置与力度混合控制
- 伸缩率控制
- 三是思考要素,用来根据感觉要素所得到的信息思考出需要采用的动作。
- 判断
- 逻辑分析
- 理解
智能机器人分类:
- 按功能分类
- 传感机器人:本体上没有智能单元只有执行机构和感应机构
- 自主型机器人:机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。
- 交互型机器人:机器人通过计算机系统与操作员或程序员进行人-机对话,实现对机器人的控制与操作。
- 按智能程度分类
- 工业机器人:只能死板地按照人给它规定的程序工作,不管外界条件有何变化,自己都不能对程序也就是对所做的工作作相应的调整。
- 初级智能机器人:具有象人那样的感受,识别,推理和判断能力。
- 高级智能机器人:具有感觉,识别,推理和判断能力,同样可以根据外界条件的变化,在一定范围内自行修改程序(通过机器人自己学习)。
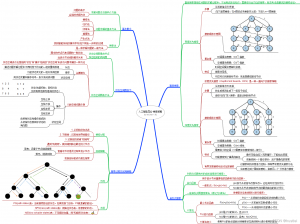
智能机器人关键技术
- 导航与定位
- 视觉导航定位
- 光反射导航定位
- GPS全球定位系统
- 超声波导航定位
- 路径规划:在机器人工作空间中找到一条从起始状态到目标状态、可以避开障碍物的最优路径。
- 模板匹配路径规划技术
- 人工势场路径规划技术
- 地图构建路径规划技术
- 人工智能路径规划技术
- 人机接口:借助人机协调来实现系统控制。
- 视觉:通过图像、文本方式控制机器人按照用户意图执行任务
- 语音:通过语音方式控制机器人按照用户意图执行任务
- 体感:通过触控、手势方式控制机器人按照用户意图执行任务
- 机器人视觉:一般由摄像机、图像采集卡和计算机组成。
- 工作包括图像的获取、图像的处理和分析、输出和显示
- 核心任务是特征提取、图像分割和图像辨识
- 多传感器信息融合
- 信息融合的功能模型
- 信息融合的结构模型
- 多传感器信息融合实现的数学模型
- 随即类方法
- 人工智能方法
- 智能控制
机器人与人工智能
- 传感信息处理:获取围信息的能力,包括视觉、触觉、力觉、嗅觉、味觉、听觉、接近感和光滑感。
- 机器人规划
- 先在抽象和忽略细节的高层进行规划
- 然后在逐步在细节越来越重要的低层进行规划
- 专家系统:智能计算机系统,处理问题的能力达到人类专家的水平
- 自然语音理解
个人总结,部分内容进行了简单的处理和归纳,如有谬误,希望大家指出,持续修订更新中。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END








![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)