
前言
推荐两个比较好的教程:
BLAS (Basic Linear Algebra Subprograms)
命名规范
BLAS基本线性代数子程序的函数命令都有一定规范,便于记忆
<character> <name> <mod> ()character
定义的是数据类型
| s | 实数域,单精度 |
|---|---|
| c | 复数域,单精度 |
| d | 实数域,双精度 |
| z | 复数域,双精度 |
也可结合起来,比如sc代表实数域和复数域的单精度类型,dz代表实数域和复数域的双精度类型。
name
针对BLAS level 1,也就是向量与向量间的操作的时候
| dot | 向量点乘 |
|---|---|
| rot | 向量旋转 |
| swap | 向量交换 |
针对BLAS level 2和3的情况,也就是矩阵参数类型
| ge | 一般矩阵 |
|---|---|
| gb | 一般带状矩阵 |
| sy | 对称矩阵 |
| sp | 对称矩阵(压缩存储) |
| sb | 对称带状矩阵 |
| he | 埃尔米特矩阵 Hermitian matrix |
| hp | 埃尔米特矩阵(压缩存储) |
| hb | 埃尔米特带状矩阵 |
| tr | 三角矩阵 |
| tp | 三角矩阵(压缩存储) |
| tb | 三角带状矩阵 |
mod
提供操作的额外信息,三种Level情况
针对Level 1
| c | 共轭向量 |
|---|---|
| u | 非共轭向量 |
| g | Givens 旋转结构 |
| m | 修正 Givens 旋转 |
| mg | 修正 Givens 旋转结构 |
针对Level 2
| mv | 矩阵-向量乘积 |
|---|---|
| sv | 求解具有一个未知向量的线性方程组 |
| r | 矩阵的一阶更新 |
| r2 | 矩阵的二阶更新 |
针对Level 3
| mm | 矩阵-矩阵乘积 |
|---|---|
| sm | 求解具有多个未知向量的线性方程组 |
| rk | 矩阵的k阶更新 |
| r2k | 矩阵的2k阶更新 |
函数实例
| ddot | 双精度、实数域,向量-向量点乘 | |
|---|---|---|
| cdotc | 复数域,向量-向量点乘,共轭 | |
| scasum | 巨型向量元素和,单精度实数域输出,单精度复数域输入 | |
| cdotu | 向量-向量点乘,一般矩阵,单精度 | |
| sgemv | 矩阵-向量点乘,一般矩阵,单精度 | |
| ztrmm | 矩阵-矩阵乘法,三角矩阵,双精度复数域 |
C接口的调用方法
C接口相对于Fortran有一个优势就是,可以指定是行优先还是列优先。调用方法就是在正常的命令规范前面加个前缀cblas_。对于复数函数?dotc和?dotu还需要加一个后缀_sub,通过指针返回复数结果,作为后一个参数添加进来。
使用CALBAS需要遵循一些规则 :
- 输入参数需要使用
const修饰 - 非复数标量输入参数直接使用值传递
- 复数标量参数使用
void指针传递 - 矩阵参数使用地址传递
- BLAS类型参数使用合适的枚举类型代替
- Level 2和3中有一个
CLABS_LAYOUT类型的额外参数,作为第一个输入参数。这个参数指定二维数组是行优先CblasRowMajor还是列优先CblasColMajor
定义的枚举类型:
enum CBLAS_LAYOUT {
CblasRowMajor=101, /* row-major arrays */
CblasColMajor=102}; /* column-major arrays */
enum CBLAS_TRANSPOSE {
CblasNoTrans=111, /* trans='N' */
CblasTrans=112, /* trans='T' */
CblasConjTrans=113}; /* trans='C' */
enum CBLAS_UPLO {
CblasUpper=121, /* uplo ='U' */
CblasLower=122}; /* uplo ='L' */
enum CBLAS_DIAG {
CblasNonUnit=131, /* diag ='N' */
CblasUnit=132}; /* diag ='U' */
enum CBLAS_SIDE {
CblasLeft=141, /* side ='L' */
CblasRight=142}; /* side ='R' */矩阵存储方案
三种存储方案:
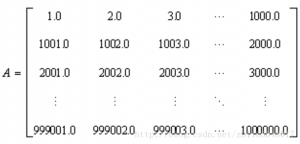
- 全部存储:比如将矩阵
A
A存储到二维数组aa中,矩阵元素
Aij
A_{ij}以列优先的方式存储到
a[i+j∗lda]
a[i+j*lda]中,或者以行优先的形式存储到
a[j+i∗lda]
a[j+i*lda]中。这里的
lda就是数组的引导维度。 - 压缩存储:用于存储对称阵,埃尔米特矩阵,三角矩阵。对于列优先的布局,上三角和下三角按照列存储到一个一维数组;或者按照行优先的布局,上三角和下三角按行存储到一个一维数组中。
- 带状存储:带状矩阵被压缩存储到一个二维数组中。对于列优先布局,矩阵的列被存储到对应的数组列中,矩阵对角部分被存储到数组的特殊行中。对于行优先的布局,矩阵的行被存储到对应数组的行中,矩阵对角部分被存储到数组的指定行中。
行优先与列优先
Fortran中以列优先的方式存储二维数组;在C中,需要数组为行优先的格式,这是C的约定。讲道理的话,这句话应该是这样写,但是官方文档给出的英文是
The BLAS routines follow the Fortran convention of storing two-dimensional arrays using column-major layout. When calling BLAS routines from C, remember that they require arrays to be in column-major format, not the row-major format that is the convention for C. Unless otherwise specified, the psuedo-code examples for the BLAS routines illustrate matrices stored using column-major layout.
这里却写着是按照列存储的。但是在Intel® Math Kernel Library Getting Started Tutorial: Using the Intel® Math Kernel Library for Matrix Multiplication中的实例却是这样

代码是

这个for循环明显是将一行一行的赋值,说明连续存储的单元是行中相邻的元素。但是后面的英文又是
The one-dimensional arrays in the exercises store the matrices by placing the elements of each column in successive cells of the arrays.
意思是联系中的以为数组是将每行列的元素放入到数组单元中。代码明明是每行的元素放入到其中。这到底是按行存储还是按列存储?两篇参考博客介绍行列存储的区别: 行优先和列优先的问题,矩阵存储的两种方式——行优先与列优先。个人感觉,姑且认为是按行存储的吧,毕竟代码是这样写的,虽然与文字不一致。如果有同学有何见解,希望在评论区讨论讨论^_^
Level 1所有函数
所有函数概览
| 函数名 | 缺失部分 | 描述 |
|---|---|---|
cblas_?asum |
s, d, sc, dz |
向量和 |
cblas_?axpy |
s, d, c, z |
标量-向量乘积 |
cblas_?copy |
s, d, c, z |
拷贝向量 |
cblas_?dot |
s,d |
点乘 |
cblas_?sdot |
sd,d |
双精度点乘 |
cblas_?dotc |
c,z |
共轭点乘 |
cblas_?dotu |
c,z |
非共轭点乘 |
cblas_?nrm2 |
s,d,sc,dz |
向量2范数 |
cblas_?rot |
s,d,cs,zd |
绕点旋转 |
cblas_?rotg |
s,d,c,z |
生成点的Givens旋转 |
cblas_?rotm |
s,d |
点的修正Givens旋转 |
cblas_?rotmg |
s,d |
生成点的修正Givens旋转 |
cblas_?scal |
s, d, c, z, cs, zd |
向量-标量乘法 |
cblas_?swap |
s, d, c, z |
向量-向量交换 |
cblas_i?amax |
s, d, c, z |
绝对值最大元素位置 |
cblas_i?amin |
s, d, c, z |
绝对值最小元素位置 |
cblas_?cabs1 |
s,d |
辅助函数,计算单精度或者双精度复数的绝对值 |
cblas_?asum
- 作用:计算向量元素和
- 定义函数
float cblas_sasum (const MKL_INT n, const float *x, const MKL_INT incx);
float cblas_scasum (const MKL_INT n, const void *x, const MKL_INT incx);
double cblas_dasum (const MKL_INT n, const double *x, const MKL_INT incx);
double cblas_dzasum (const MKL_INT n, const void *x, const MKL_INT incx);-
运算
计算实数向量的元素和,或者计算复数向量的实部以及虚部的和
res=|Re(x1)|+|Im(x1)|+|Re(x2|+|Im(x2)|+⋯+|Re(xn)|+|Im(xn)|
res=|Re (x_1)|+|Im(x_1)|+|Re (x_2|+|Im(x_2)|+\\cdots+|Re (x_n)|+|Im(x_n)|
-
输入参数
n
n : 向量的元素个数xx : 数组,大小至少是
(1+(n−1)∗abs(incx))
(1+(n-1)*abs(incx))incx
incx : 指定索引向量x
x的增量 -
返回值:向量所有元素的和
cblas_?axpy
- 作用 : 计算向量-标量的积,然后加到结果上
- 定义函数
void cblas_saxpy (const MKL_INT n, const float a, const float *x, const MKL_INT incx, float *y, const MKL_INT incy);
void cblas_daxpy (const MKL_INT n, const double a, const double *x, const MKL_INT incx, double *y, const MKL_INT incy);
void cblas_caxpy (const MKL_INT n, const void *a, const void *x, const MKL_INT incx, void *y, const MKL_INT incy);
void cblas_zaxpy (const MKL_INT n, const void *a, const void *x, const MKL_INT incx, void *y, const MKL_INT incy);- 运算
向量与向量之间的操作
y:=a*x+y
-
输入参数
n
n : 指定向量x,yx,y的元素个数a
a : 标量aax
x : 数组,大小至少是(1+(n−1)∗abs(incx))(1+(n-1)*abs(incx))incx
incx : 指定索引向量x
x的增量yy : 数组,大小至少是
(1+(n−1)∗abs(incy))
(1+(n-1)*abs(incy))incy
incy : 指定索引向量y
y的增量 -
返回值 : 最终更新得到的向量yy
cblas_?copy
-
作用 : 拷贝一个向量到另一个向量
-
定义函数
void cblas_scopy (const MKL_INT n, const float *x, const MKL_INT incx, float *y, const MKL_INT incy); void cblas_dcopy (const MKL_INT n, const double *x, const MKL_INT incx, double *y, const MKL_INT incy); void cblas_ccopy (const MKL_INT n, const void *x, const MKL_INT incx, void *y, const MKL_INT incy); void cblas_zcopy (const MKL_INT n, const void *x, const MKL_INT incx, void *y, const MKL_INT incy); -
运算
拷贝向量
y=x
y=x -
输入参数
n
n : 指定向量x,yx,y的元素个数x
x : 数组,大小至少是(1+(n−1)∗abs(incx))(1+(n-1)*abs(incx))incx
incx : 指定索引向量x
x的增量yy : 数组,大小至少是
(1+(n−1)∗abs(incy))
(1+(n-1)*abs(incy))incy
incy : 指定索引向量y
y的增量 -
返回值 : 当nn是正数的时候,向量
x
x的拷贝被返回,否则参数不变。
cblas_?dot
-
作用 : 计算向量-向量的点乘
-
定义函数
float cblas_sdot (const MKL_INT n, const float *x, const MKL_INT incx, const float *y, const MKL_INT incy); double cblas_ddot (const MKL_INT n, const double *x, const MKL_INT incx, const double *y, const MKL_INT incy); -
运算 :
res=∑i=1nxi∗yires=\\sum_{i=1}^nx_i*y_i
-
输入参数
n,x,incx,y,incy
n,x,incx,y,incy分别代表元素个数,数组x
x,数组xx的索引增量,数组y
y,数组yy的索引增量 -
返回值 : 返回两个向量的点乘;如果
n<0
n<0,返回0
cblas_?sdot
-
作用 : 计算双精度向量-向量的点乘
-
定义函数
float cblas_sdsdot (const MKL_INT n, const float sb, const float *sx, const MKL_INT incx, const float *sy, const MKL_INT incy); double cblas_dsdot (const MKL_INT n, const float *sx, const MKL_INT incx, const float *sy, const MKL_INT incy); -
运算
?sdot计算的是两个双精度向量的内积(点积),中间结果的累积是双精度的,但是sdsdot返回的结果是单精度的,使用dsdot可以输出双精度的结果。其中sdsdot为点积结果加一个标量值sb -
输入参数
n
n : 输入向量xx和y
y的维度sbsb : 内积的单精度缩放值(仅针对
sdsdot)sx,sy
sx,sy : 数组,包含单精度输入向量incx,incy
incx,incy : 两个数组的索引增量 -
返回值 : 当
n
n为正的时候,返回两个数组的点乘(sdsdot结果加一个标量sb);若n≤0n\\leq0,对于sdsdot返回sb
sb,对于dsdot返回0
cblas_?dotc
-
作用 : 计算一个共轭向量与另一个向量的点积
-
定义函数
void cblas_cdotc_sub (const MKL_INT n, const void *x, const MKL_INT incx, const void *y, const MKL_INT incy, void *dotc); void cblas_zdotc_sub (const MKL_INT n, const void *x, const MKL_INT incx, const void *y, const MKL_INT incy, void *dotc); -
运算
res=∑i=1nconjg(xi)∗yi
res=\\sum_{i=1}^n conjg(x_i)*y_i
-
输入参数
n,x,incx,y,incy
n,x,incx,y,incy分别代表元素个数,数组x
x及其索引增量,数组yy及其增量 -
输出 : 如果
n>0
n>0,输出共轭向量x
x与非共轭向量yy的点乘,否则返回0
cblas_?dotu
-
作用 : 计算复数域的向量-向量的点积
-
定义函数
void cblas_cdotu_sub (const MKL_INT n, const void *x, const MKL_INT incx, const void *y, const MKL_INT incy, void *dotu); void cblas_zdotu_sub (const MKL_INT n, const void *x, const MKL_INT incx, const void *y, const MKL_INT incy, void *dotu); -
运算
res=∑i=1nxi∗yi
res=\\sum_{i=1}^n x_i*y_i
其中xi
x_i和yi
y_i分别是复数向量x
x和yy的元素 -
输入参数 : 同上
-
输出参数 : 如果
n>0
n>0,返回点积,否则返回0
cblas_?nrm2
-
作用 : 计算一个向量的欧几里得范数(Euclidean norm)
-
定义函数
float cblas_snrm2 (const MKL_INT n, const float *x, const MKL_INT incx); double cblas_dnrm2 (const MKL_INT n, const double *x, const MKL_INT incx); float cblas_scnrm2 (const MKL_INT n, const void *x, const MKL_INT incx); double cblas_dznrm2 (const MKL_INT n, const void *x, const MKL_INT incx); -
运算
res=||x||
res=||x||
-
输入参数 : 元素个数,数组,索引增量
-
返回值 : 向量
x
x的欧几里得范数
cblas_?rot
-
作用 : 平面上绕点旋转
-
定义函数
void cblas_srot (const MKL_INT n, float *x, const MKL_INT incx, float *y, const MKL_INT incy, const float c, const float s); void cblas_drot (const MKL_INT n, double *x, const MKL_INT incx, double *y, const MKL_INT incy, const double c, const double s); void cblas_csrot (const MKL_INT n, void *x, const MKL_INT incx, void *y, const MKL_INT incy, const float c, const float s); void cblas_zdrot (const MKL_INT n, void *x, const MKL_INT incx, void *y, const MKL_INT incy, const double c, const double s); -
运算
通俗写法
[xi,yi]=[xi,yi][cs−sc][x_i,y_i]=[x_i,y_i]\\left[
\\begin{matrix}
c&-s\\\\
s&c
\\end{matrix}
\\right]
官方写法
xi=c∗xi+s∗yiyi=c∗yi−s∗xi
x_i = c*x_i + s*y_i\\\\
y_i = c*y_i – s*x_i -
输入参数 : 元素个数,两个向量,对应的索引增量,
c,s
c,s表示所绕点的坐标标量 -
输出参数 :
x
x的每个元素被c∗x+s∗yc*x+s*y代替,y
y的每个元素被c∗y−s∗xc*y-s*x代替
cblas_?rotg
-
作用 : 计算Givens旋转参数
-
定义函数
void cblas_srotg (float *a, float *b, float *c, float *s); void cblas_drotg (double *a, double *b, double *c, double *s); void cblas_crotg (void *a, const void *b, float *c, void *s); void cblas_zrotg (void *a, const void *b, double *c, void *s); -
运算
给定一个点的笛卡尔(Cartesian)坐标
(a,b)
(a,b),返回参数c,s,r,z
c,s,r,z对应Givens旋转,c,s
c,s对应的是酉阵(unitary matrix),类似于
[c−ssc][ab]=[r0]
\\begin{bmatrix}
c&s\\\\
-s&c
\\end{bmatrix}
\\begin{bmatrix}
a\\\\
b
\\end{bmatrix}=
\\begin{bmatrix}
r\\\\
0
\\end{bmatrix}
参数z
z这样定义 : 如果|a|>|b||a|>|b|,那么z=s
z=s,否则如果c≠0
c\\neq 0,那么z=1c
z=\\frac{1}{c},否则z=1
z=1 -
输入参数 :
a,b
a,b分别提供点p
p的横xx坐标和纵y
y坐标 -
输出参数 : Givens的四个参数
cblas_?rotm
-
作用 : 修正绕平面是一点的Givens旋转
-
定义函数
void cblas_srotm (const MKL_INT n, float *x, const MKL_INT incx, float *y, const MKL_INT incy, const float *param); void cblas_drotm (const MKL_INT n, double *x, const MKL_INT incx, double *y, const MKL_INT incy, const double *param); -
运算
给定两个向量x,yx,y,这些向量的每个元素都会被替代为
[xiyi]=H[xiyi]
\\begin{bmatrix}
x_i\\\\
y_i
\\end{bmatrix}=
H\\begin{bmatrix}
x_i\\\\
y_i
\\end{bmatrix}
其中i=1⋯n
i=1\\cdots n,H是修正Givens旋转矩阵,值存储在parm[1]
parm[1]至parm[4]
parm[4]中 -
输入参数
n,x,incx,y,incy,
n,x,incx,y,incy,分别表示元素个数,两个向量,对应增量索引param : 包含五个参数,
param[0]
param[0]代表切换标志,param[1−4]
param[1- 4]均包含h11,h12,h21,h22
h_{11},h_{12},h_{21},h_{22},分别对应数组H
H的成分,依据标识符,可以得到如下数组HH
flag=−1.0:H=[h11h21h12h22]flag=0.0:H=[1.0h21h121.0]flag=1.0:H=[h11−1.01.0h22]flag=−2.0:H=[1.00.00.01.0]
flag = -1.0: H =\\begin{bmatrix}
h_{11} &h_{12}\\\\
h_{21} &h_{22}
\\end{bmatrix}\\\\
flag = 0.0: H =\\begin{bmatrix}
1.0& h_{12}\\\\
h_{21} &1.0
\\end{bmatrix}\\\\
flag = 1.0: H =\\begin{bmatrix}
h_{11}& 1.0\\\\
-1.0 &h_{22}
\\end{bmatrix}\\\\
flag = -2.0: H =
\\begin{bmatrix}
1.0 &0.0\\\\
0.0 & 1.0
\\end{bmatrix}
后三种情况,矩阵H
H中的−0.1,−1.0,0.0-0.1,-1.0,0.0可以由标志指定,无需在向量中写出来 -
输出 :
x
x的每一个向量被h11∗x[i]+h12∗y[i]h_{11}*x[i] + h_{12}*y[i] 替换,y
y的每一个向量被h21∗x[i]+h22∗y[i]h_{21}*x[i] + h_{22}*y[i] 替换
cblas_?rotmg
-
作用 : 计算修正Givens旋转的参数
-
定义函数
void cblas_srotmg (float *d1, float *d2, float *x1, const float y1, float *param); void cblas_drotmg (double *d1, double *d2, double *x1, const double y1, double *param); -
运算
给定输入向量的笛卡尔坐标
(x1,y1)
(x_1,y_1),计算将结果向量的y置零时候,计算得到的Givens旋转矩阵H
H
[x10]=H[x1d1−−√y1d2−−√]\\begin{bmatrix}
x_1\\\\
0
\\end{bmatrix}=
H\\begin{bmatrix}
x_1\\sqrt{d_1}\\\\
y_1\\sqrt{d_2}
\\end{bmatrix} -
输入参数
d1
d1代表向量的x
x轴缩放因子,d2d2代表向量的y轴缩放因子,x1,y1
x1,y1是输入向量的横纵坐标 -
输出
d1
d1是更新矩阵的第一对角元d2
d2是更新矩阵的第二对角元x1
x1是缩放之前旋转向量的x坐标param
param同上cblas_?rotmg的输入parma
parma一样
cblas_?scal
-
作用 : 计算向量和标量的乘积
-
定义函数
void cblas_sscal (const MKL_INT n, const float a, float *x, const MKL_INT incx); void cblas_dscal (const MKL_INT n, const double a, double *x, const MKL_INT incx); void cblas_cscal (const MKL_INT n, const void *a, void *x, const MKL_INT incx); void cblas_zscal (const MKL_INT n, const void *a, void *x, const MKL_INT incx); void cblas_csscal (const MKL_INT n, const float a, void *x, const MKL_INT incx); void cblas_zdscal (const MKL_INT n, const double a, void *x, const MKL_INT incx); -
运算
x=a∗x
x=a*x
-
输入参数
n
n向量的元素个数,aa标量,x
x数组,incxincx向量x的索引增量 -
输出 : 更新后的向量
x
x
cblas_?swap
-
作用 : 交换向量值
-
定义函数
void cblas_sswap (const MKL_INT n, float *x, const MKL_INT incx, float *y, const MKL_INT incy); void cblas_dswap (const MKL_INT n, double *x, const MKL_INT incx, double *y, const MKL_INT incy); void cblas_cswap (const MKL_INT n, void *x, const MKL_INT incx, void *y, const MKL_INT incy); void cblas_zswap (const MKL_INT n, void *x, const MKL_INT incx, void *y, const MKL_INT incy); -
计算:交换向量xx和
y
y,互相代替元素值 -
输入参数 : 正常的五个输入,元素个数,数组,增量索引
-
输出 : 交换后的向量x,yx,y
cblas_i?amax
-
作用 : 找到绝对值最大的元素的索引
-
定义函数
CBLAS_INDEX cblas_isamax (const MKL_INT n, const float *x, const MKL_INT incx); CBLAS_INDEX cblas_idamax (const MKL_INT n, const double *x, const MKL_INT incx); CBLAS_INDEX cblas_icamax (const MKL_INT n, const void *x, const MKL_INT incx); CBLAS_INDEX cblas_izamax (const MKL_INT n, const void *x, const MKL_INT incx); -
计算 : 给定向量
x
x,函数i?amax返回实数域中绝对值最大的向量元素x[i]x[i]的位置,或者返回复数域|Re(x[i])|+|Im(x[i])|
|Re(x[i])|+|Im(x[i])|和的最大值如果
n
n非正,则返回如果向量中有好几个位置的值等于最大元素,第一个位置将被返回
-
输入参数 : n,x,incxn,x,incx分别代表向量元素个数,数组,索引增量
-
返回值 : 返回最大值元素的位置,比如
x[index−1]
x[index-1]具有最大的绝对值
cblas_i?amin
-
作用 : 返回最小值的位置
-
定义函数
CBLAS_INDEX cblas_isamin (const MKL_INT n, const float *x, const MKL_INT incx); CBLAS_INDEX cblas_idamin (const MKL_INT n, const double *x, const MKL_INT incx); CBLAS_INDEX cblas_icamin (const MKL_INT n, const void *x, const MKL_INT incx); CBLAS_INDEX cblas_izamin (const MKL_INT n, const void *x, const MKL_INT incx); -
计算 :
i?amin返回的是向量的最小绝对值的位置。与i?amax类似 -
输入参数: 同
i?amax -
返回值: 绝对值最小元素位置的索引,比如
x[index−1]
x[index-1] 具有最小的绝对值
cblas_?cabs1
-
作用: 计算复数的绝对值,是一个辅助函数,用于辅助其它函数的实现
-
定义函数
float cblas_scabs1 (const void *z); double cblas_dcabs1 (const void *z); -
计算
res=|Re(z)|+|Im(z)|
res=|Re(z)|+|Im(z)|
-
输入: 标量
z
z -
返回值: 复数zz的绝对值








![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)


