第十讲:四个基本子空间
假设A是m×n,列空间C(A),零空间N(A),行空间C(A^T),A转置的零空间(通常叫左零空间)N(A^T),这是线性代数的核心内容,研究这四个基本子空间及其关系。我们从上一讲中的基、维数对这四个空间进行学习。
1.维数
1.1四种空间的定义
A是m*n的矩阵。
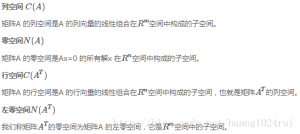
零空间N(A):n 维向量,是Ax=0 的解,所以N(A)在R^n里。
列空间C(A): 列向量是m维的,所以C(A)在R^m里。
行空间C(A^T):A的行的所有线性组合,即A转置的列的线性组合(因为我们不习惯处理行向量C(A^T)在R^n里。
A的左零空间N(A^T):A转置的零空间N(A^T)在R^m里面。
1.2 四种空间的维数
四种空间的维数是多少dimension?
列空间C(A):A的主列就是列空间的一组基,dim(C(A))=Rank(A)=r,维数就是秩的大小。
行空间C(A^T):dim(C(A^T))=Rank(A)=r,有一个重要的性质:行空间和列空间维数相同,都等于秩的大小。
零空间N(A):一组基就是一组特殊解,r 是主变量的个数,n-r 是自由变量的个数,零空间的维数等于n-r,即dim(N(A))=n-r。
左零空间N(A^T):矩阵A^T有m 列,而其秩为r,因此A^T自由列数目为m-r,所以dim(N(A^T))=m-r。
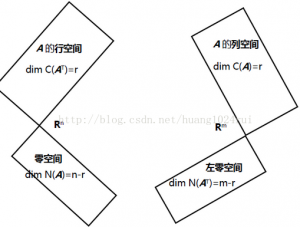
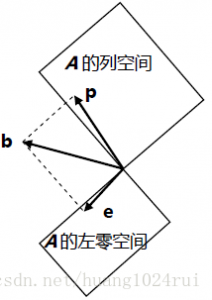
行空间和零空间在R^n 里,他们的维数加起来等于n,列空间和左零空间在R^m里,他们的维数加起来等于m。如下图所示:
![图片[1]-MIT 线性代数(10—12)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460a780e.png)
1.3对这四个空间进行总结
1)n维空间中存在两个子空间,一个r维的行空间,一个n-r维的零空间,维数和为n。和另一个结论相似(在求解Ax=b处):
r 个主变量,n-r 个是自由变量,加起来是n。
2)m维空间中存在两个子空间,一个r维的列空间,一个m-r维的左零空间,维数和为m。
2.基
列空间C(A):主列组合就是一组基。
零空间N(A):Ax=0一组特殊解就是一组基。
行空间C(A^T):通过初等行变换变换成行最简式,行空间的一组基即是行最简形R 的前r(秩数)行。(行变换不会对行空间产生影响,但会对列空间产生影响。)
例如:
![图片[2]-MIT 线性代数(10—12)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460d43ee.png)
![图片[2]-MIT 线性代数(10—12)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460ecf58.png)
A通过初等行变换得到R,前两行就是行空间的一组基,为什么说它们一定在矩阵的行空间里?
因为行变换的时候是某行和令一行相加或相减,即是这些行向量的的线性组合。
左零空间N(A^T):为什么叫左零空间?
A^T*y=0,将等式左右两边都转置,得:y^T*A=0^T,如下,所以叫左零空间。![图片[3]-MIT 线性代数(10—12)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d461128ce.png)
但我们一般还是习惯用ATy=0,因为希望y 是列向量。
求矩阵的左零空间,就试着寻找一个产生零行向量的行组合,求矩阵的零空间,就试着寻找一个产生零列向量的列组合。
![图片[4]-MIT 线性代数(10—12)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d4613b927.png)
如上,求A得左零空间,通过行变换得到R,R的最后一行是0 向量,行变换的逆变换E 的最后一行即是A的各行的组合产生0 向量的向量。即,左零空间的一组基为[-1,0,1]
3.总结
1)四种空间的定义和维度。
2)四种空间的基向量(由哪些向量张成的空间)。
——————————————————————————————————————————————————
第十一讲 矩阵空间、秩1空间和小世界图
本章节分三部分:把矩阵空间的定义从向量的形式扩展到矩阵和微分方程的的形式;任何举证都能由秩1矩阵导出;利用矩阵的相关知识可以导出图中的知识,引出下一章的知识。
1.矩阵空间
1.1 引子
所有的3*3 矩阵,把矩阵看着"向量",每个3*3 的矩阵都是一个"向量",叫他们为向量,因为他们服从向量加法,乘法,又能够对矩阵进行线性组合。向量空间,关心的是A+B 和cA。子空间比如上三角矩阵,对称矩阵,子空间的交集也是子空间。关注他们的维数,基。3*3 的对角矩阵的维数为3,一组基为
认为这三个矩阵相互线性无关,而且任何的对角矩阵可通过这三个组合得到,因此他们生成了对角矩阵空间。我们把R^n 的概念延伸至R^(n*n),他们仍对加法和乘法封闭。
1.2矩阵空间的定义
矩阵空间,可看作是新的向量空间,比如3×3的矩阵,它们加法或数乘都停留在3×3矩阵空间,3×3矩阵有一些子空间:1)3×3对称矩阵的子空间(两个对称矩阵相加还是对称的,数乘对称矩阵还是对称的),2)3×3的上三角矩阵的子空间等。考查它们的基,维数。
M:3×3 的所有矩阵,它的维数是9,一组基是:
我们所处的空间与这9维空间几乎相同,只是9个基是写为一个方阵而不是一列。
此矩阵空间的子空间和它的基与维数是:
1)S:3×3 的对称矩阵
S维数是6,一组基是:对角线三个元素和对角线以上的3个元素分别为1 其余为0的6个矩阵(由这6个矩阵就可得到所有的3×3 的对称矩阵了,因为下三角的元素可由上三角的元素可知结果)。
2)U:3×3 的上三角矩阵
U维数是6,一组基是:上三角的6个元素分别为1其余为0。
3)S∩U 对称矩阵交上三角矩阵维数是3(就只有对角线上有非0元素)。
4)S+U(注意不是S∪U,因为它不构成子空间) 取S内任一元素(矩阵)加上U内任一元素(矩阵)即可,它可以得到所有3×3矩阵,而很明显它的维数是9,而不是dim(S)+dim(U)=dim(S∩U)+dim(S+U)=6+6=3+9。
1.3微分方程的解空间
微分方程的解空间(要点在于有些东西不像向量,但我们可以称它们为向量,可以做加法,数乘,线性组合,这就是为什么线性代数、基、维度等概念不仅仅用于我们一直讨论的m×n矩阵)。例如:
通过1.1到1.3可以看到,空间的定义可以扩展到矩阵、微分方程等带有参数的解的形式。
2.秩1矩阵
2.1定义
所有秩1 的矩阵都可表示为一列乘以一行的形式:A=U(V^T),U是列向量,V也是列向量。例如:
我们在抽象的想:秩1矩阵可以就像搭建其他矩阵的积木一样,如果有5×17 的矩阵,秩为4,可以把这5×17 的矩阵分解为4个秩1矩阵的组合。
问题:秩1 矩阵组成的集合是子空间吗?
假设矩阵空间M的所有5×17的矩阵,一个由秩4矩阵组成的子集,子集中两个矩阵相加结果很可能是一个秩为5矩阵,而不是秩4矩阵。由秩1 矩阵组成的子集,相加结果很可能是一个秩2 矩阵。这说明,它的秩1矩阵组成的子集不是子空间。
2.2 秩1矩阵所组成的向量空间
假设R^4中,假设各分量之和为零的所有向量构成的集合S,即:
S能否构成一个子空间?
能,因为这些向量数乘常数或相加后仍等于0,那么子空间S的基和维数是怎样的?
3.小世界图
运用小世界引出图论和线性代数的关系。
图是结点和边的集合,边连通各个结点。比如一个5 个点6 条边的图可以用一个5×6 的矩阵完全表示。一个有趣的问题是:一个由很多结点和很多条边组成的图,最大的两点距离是多少?有研究表明,通常不超过6步。这就是小世界的来源,下一讲会细讲。
———————————————————————————————————————————————————————————————————-
第十二讲 图和网络
本讲着重于线性代数的应用,线性代数处理的矩阵都是有出处的,来自实际问题,描述问题的拓扑结构。应用数学中最重要的模型,离散数学称之为”图“。我们从图和矩阵推导出欧姆定律、基尔霍夫电流定律、欧拉公式之间的关系。(此章节中x可认为是电势、y认为是电流)
1.图和矩阵与欧姆定律、基尔霍夫电流定理
1.1提出问题
假设一个电路图,4个结点,n=4,5条边,m=5,用矩阵来表示这些信息,这个矩阵叫做关联矩阵(Incidence Matrix)。其中:用矩阵A来表示,正负表示方向,每一行表示一条边。
将1,2,3 条边表示出来后,这三条边是一个回路,从这个子图的矩阵中,这三行是线性相关的,行1+行2=行3,说明”回路“意味着”相关“,与回路对应的行是线性相关的。
关联矩阵源于问题,描述了问题的拓扑结构,它可能是一个非常稀疏的矩阵。
1.2引出欧姆定律和基尔霍夫电流定理
矩阵A的零空间是什么(回顾:零空间告诉我们,如何对列向量进行组合可得到零向量,如果存在非0组合则说明列向量线性相关,如果只存在0组合得到零向量,则说明列向量线性无关)。
我们现在看矩阵A转置的零空间(即(A^T)y=0)。
假设矩阵C把电势差和电流联系起来,它的元素表示各边上的电流值y_1,y_2,y_3,y_4,y_5,电流和电势差的关系服从欧姆定律(欧姆定律:边上的电流值是电势差的倍数,这个倍数就是边的电导(conductance)即电阻(resistance)的倒数,告诉我们产生了多少电流)。
而(A^T)y=0的另一个名字叫做“基尔霍夫电流定律”(Kirchoff's Law, 简称KCL)。
2.图和矩阵与欧拉公式
2.1 (A^T)y=0的解
2.2 引出欧拉公式
A的行空间是怎样的?即求(A^T)的列空间。
列1,列2,列4 是主列,在电路图中看,那三条边是没有回路的,线性无关等价于没有回路。
由4个节点与3条边组成的图没有回路,就表明(A^T)的对应列向量线性无关,也就是节点数减一(rank=node-1)条边线性无关。另外,没有回路的图也叫作树(Tree)。
dim(N(A^T))=m-r,即
线性无关(两回路之间无关)的回路数量#loops=边的数量#edges-列空间的秩#rank(等于n-1,结点的数量-1,1 为A 零空间的维)
#loops = #edges – (#nodes-1)
#nodes – #edges + #loops = 1
这对任何图都成立,这就是欧拉公式(用线性代数证明欧拉公式)。
3.总结
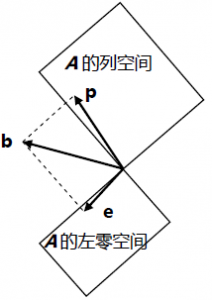
- 将电势记为e,则在引入电势的第一步中,有e=Ax;
- 电势差导致电流产生,y=Ce;(电流y 等于电势差的常数倍,欧姆定律)
- 电流满足基尔霍夫定律方程,(A^T)y=0;(基尔霍夫电流定律,在没有外部电源电压的影响下f设为0)
上述三式是在无电源情况下的方程。
电源可以通过:在边上加电池(电压源),或在节点上加外部电流 两种方式接入。
如果在边上加电池,会体现在e=Ax中;如果在节点上加电流,会体现在(A^T)y=f中,f向量就是外部电流。
将以上三个等式连起来得到(A^T)CAx=f。另外,最后一个方程是一个平衡方程,还需要注意的是,方程仅描述平衡状态,方程并不考虑时间。最后,(A^T)A是一个对称矩阵。

![图片[1]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460a780e.png)
![图片[2]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460d43ee.png)
![图片[2]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130016-6395d460ecf58.png)
![图片[3]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d461128ce.png)
![图片[4]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d4613b927.png)
![图片[5]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d46160192.png)
![图片[6]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d461797b3.png)
![图片[7]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d4619be0c.png)
![图片[8]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d461bb23e.png)
![图片[9]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130017-6395d461d9d50.png)
![图片[10]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130018-6395d462048a3.png)
![图片[11]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130018-6395d46248544.png)
![图片[12]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130018-6395d46274729.png)
![图片[13]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130018-6395d4629d6d2.png)
![图片[14]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130018-6395d462bc6d4.png)
![图片[15]-MIT 线性代数(10—12)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130019-6395d463ed277.png)






![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)