排序

自动驾驶仿真 (四)—— 基于PreScan与Simulink的UDP数据通信
自动驾驶仿真四—— 基于PreScan与Simulink的UDP数据通信 1. 数据通信的需求2. Simulink的UDP通信模块3. AEB系统模型的UDP通信建模4. 仿真结果分析5. 参考学习的书目教材 1. 数据通信的需求 博...
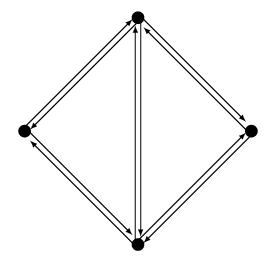
第二十一课,几何着色器(基础篇)
几何着色器的作用 输入 输入类型 从顶点着色器接收下列任何一个图元值: 类型数组大小points:绘制GL_POINTS图元时。1lines:绘制GL_LINES或GL_LINE_STRIP时2lines_adjacency...

3小时GIS入门教程(三)ArcGIS 10基本操作
文章目录 前言一、软件安装二、ArcMap基本操作1.启动ArcMap2.缺省用户界面3.用户界面的定制4.新建地图4.1 数据框架操作(Data Frame)4.2 层操作(Layer)4.3 组图层操...
![[GIS原理] 9 数字地形分析DTA、数字地形模型DTM、数字高程模型DEM、数字地表模型DSM、不规则三角网TIN-卡核](https://www.caxkernel.com/wp-content/uploads/2023/04/ind1-1.png)
[GIS原理] 9 数字地形分析DTA、数字地形模型DTM、数字高程模型DEM、数字地表模型DSM、不规则三角网TIN
在知识传播途中,向涉及到的相关著作权人谨致谢意! 文章目录 1 数字地形分析(DTA)1.1 数字地形模型(DTM)1.1.1 DSM与DEM对比 1.2 数字地形分析研究与...

DirectX12(D3D12)基础教程(外篇四)——用Assimp载入模型基础操作(无渲染纯命令行版)
目录 1、前言2、Assimp使用简介3、Assimp头文件和库文件引入4、Import模型文件5、aiScene基本数据结构及遍历5.1、Assimp类图及关系5.2、aiScene遍历5.3、网格数据(aiMesh)5.4、材...
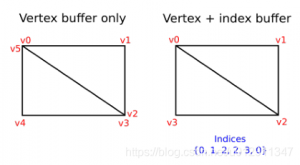
Vulkan教程 – 15 索引缓冲
顶点缓冲已经能正常工作了,但是让我们能够从CPU访问的内存类型可能对显卡本身读取来说不是最优的。最好的内存会有VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT标记,且通...
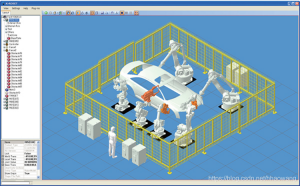
工业机器人(6)川崎机器人仿真软件K-ROSET
1. 机器人模拟软件 - K-ROSET K-ROSET是川崎的离线机器人模拟软件。该工具允许用户添加川崎机器人、外围设备、机器人工具及工件的3维模型到一个虚拟环境中并建立多机器人自动化工作单元。该软件...

要闻 | 工业软件领域每周要闻(11.07-11.13)
政策环境1、2022年湖南省工业互联网APP典型应用案例名单公示根据湖南省工信厅《关于组织开展2022年湖南省工业互联网APP典型应用案例征集活动的通知》,经企业自主申报、市州推荐和专家评审,现...
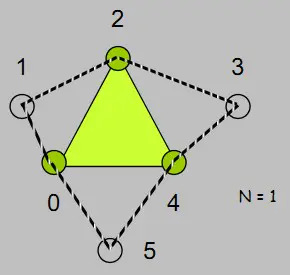
OpenMesh学习笔记6 怎样遍历网格
怎样遍历网格 介绍 遍历大家都清楚的吧,学习数据结构的时候就经常讲到遍历,比如八叉树中,要遍历每一个节点,有各种遍历方法,什么深度优先遍历,广...

MKL学习——基本操作C++实现
前言 前面介绍了各种向量-向量,矩阵-向量,矩阵-矩阵的函数简介。根据自身目前状况,主要使用实数域的操作,也就是说关注单精度float类型的s和双精度double类型的d。...
【Qt】Qt6调用Visual Studio2019生成的动态库详解
00. 目录 文章目录 00. 目录01. 开发环境02. Visual Studio 2019生成动态库03. 新建Qt项目04. 编写测试程序05. 其它参考06. 附录 01. 开发环境 Qt环境:Qt5.15 或者Qt6 VS环境:Vis...
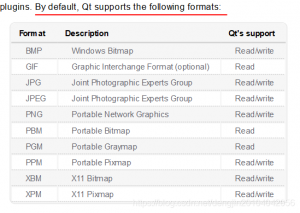
【Qt】2D绘图之绘制图像(二)
00. 目录 文章目录 00. 目录01. 概述02. 开发环境03. 绘制QImage图像04. 绘制QPixmap图像05. 绘制QPicture图像06. 综合对比07. 附录 01. 概述 Qt提供了四个类来处理图像数据:QImage、QPi...