排序

vtkSMReaderFactory::TestFileReadability
vtkSMReaderFactory::TestFileReadability bool vtkSMReaderFactory::TestFileReadability(const char* filename, vtkSMSession* session) { assert("Session should be valid" &am...

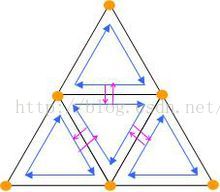
【CGAL_网格处理】Isotropic Remeshing均匀化网格
原理 算法伪代码如下: remesh(target_edge_length) low = 4/5 * target_edge_length high = 4/3 * target_edge_length for i = 0 to 10 do spilt_long_edges(high) colla...
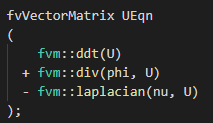
OpenFOAM不可压求解器pimpleFoam研究(一)粘度实现
OpenFOAM提供了几个单相的不可压求解器:icoFoam(瞬态,层流)、simpleFoam(稳态,湍流)、pisoFoam(瞬态,湍流)和pimpleFoa...

多传感器融合技术——基于Ubuntu Linux系统ROS平台的数据可视化
多传感器融合技术——基于Ubuntu Linux系统ROS平台的数据可视化 1. VMware下安装Ubuntu2. ROS平台3. 数据集4. 数据可视化5.参考学习的书目及论文 博主之前就简单写了当前手上传感器融合感知项目...
第十七课,帧缓存(后期处理)
反向 void main() { FragColor = vec4(vec3(1.0 - texture(screenTexture, TexCoords)), 1.0); } 灰度 均分灰度 void main() { FragColor = texture(screenTexture, TexCoords); floa...
![[GIS热点] 数字智慧工程-数字城市、数字中国、数字地球、智慧城市、智慧地球-卡核](https://www.caxkernel.com/wp-content/uploads/2022/09/20220907071003-631843cb708fb-300x101.png)
[GIS热点] 数字智慧工程-数字城市、数字中国、数字地球、智慧城市、智慧地球
文章目录 数字智慧时代城市信息化工程数字城市智慧城市数字与智慧的对比GIS的地位GIS的作用(机遇)GIS的挑战应用 中国数字中国 地球数字地球智慧地球 数字智慧时代 城市信息化工程...
![[GIS原理] 9.5 可视性分析-卡核](https://www.caxkernel.com/wp-content/uploads/2022/04/640.jpeg)
[GIS原理] 9.5 可视性分析
在知识传播途中,向涉及到的相关著作权人谨致谢意! 【可视性分析】 也称作为地形通视性(visibility),是指从一个或多个位置所能看到的地形范围或与其他地形点...
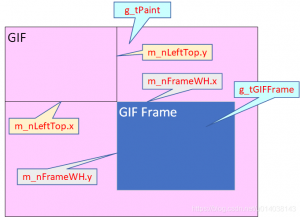
DirectX12(D3D12)基础教程(十四)——使用WIC、Computer Shader显示GIF动画纹理(下)
文章目录 5、用DirectComputer完成GIF帧预处理5.1、Computer Shader中以数组方式访问纹理完成帧预处理5.2、Dispatch启动GIF帧绘制 5、用DirectComputer完成GIF帧预处理 当看到这一小节的标...
Vulkan教程 – 24 生成Mip贴图
现在我们的程序可以加载和渲染3D模型了,本章我们再添加一个新的特性,Mip贴图。Mip贴图是被游戏和渲染软件所广泛使用的,Vulkan也对Mip生成给了我们足够的控制。 Mip贴图是...

工业机器人 (1)– 国内外研究现状
目录 1. 工业机器人简介 2. 国外机器人供应商 2.1瑞典 ABB 2.2 日本安川电机 2.3 日本FANUC 2.4 德国KUKA 3. 国产新松 1. 工业机器人简介 自1962年美国制造出第一台实用的示教型工业机器人以...

DIY一个基于树莓派和Python的无人机视觉跟踪系统
DIY一个基于树莓派和Python的无人机视觉跟踪系统 无人机通过图传将航拍到的图像存储并实时传送回地面站几乎已经是标配。如果想来点高级的——在无人机上直接处理拍摄的图像并实现自动控制要...
OpenMesh学习笔记3 半边数据结构
半边数据结构 概述 本节主要是简单介绍一下OpenMesh中所使用的用于存储网格实体,如顶点、边、面和连接信息的主要数据结构——半边数据结构(Halfedge Data Structure...