
文章目录
【XJTUSE计算机图形学】第二章 光栅图形学(2)—消隐
基本概念
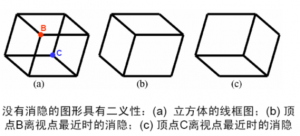
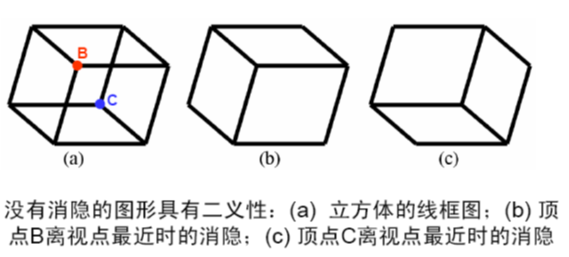
投影变换失去了深度信息,往往导致图形的二义性
消隐:为了消除二义性,必须在绘制时消除被遮挡的不可见的线或面,习惯上称作消除隐藏线和隐藏面;
经过消隐得到的投影图称为物体的真实图形。
消隐的对象是三维物体。三维体的表示主要有边界表示和构造实体几何表示等。
最简单的方法:用表面上的平面多边形表示。
消隐结果与观察物体有关,也与视点有关。

几个假设
1️⃣ 投影平面是oxy平面;
2️⃣ 投影方向为负z轴方向的平行投影;
值越大,离视点越近;
透视变换转化为平行投影。
3️⃣ 不能处理相互贯穿或循环遮挡的物体,此时应做特殊处理。

在实时模拟过程中,要求消隐算法速度快,通常生成的图形质量一般;
在真实感图形生成过程中,要生成高质量的图形,通常消隐算法速度较慢。
消隐算法的权衡:消隐效率、图形质量。
与消隐与密切相关的因素
物体排序:判断场景中的物体全部或者部分与视点之间的远近;
连贯性:场景中物体或其投影所表现出来的相似程度。
提高消隐算法效率的常见方法
利用连贯性、包围盒技术、背面剔除、空间分割技术、物体分层表示
利用连贯性
利用连贯性:相邻事物的属性之间有一定的连贯性,其属性值通常是平缓过渡的,如颜色值、空间位置关系等
物体连贯性
面的连贯性
区域连贯性
扫描线的连贯性
深度连贯性
包围盒技术
一个形体的包围盒指的是包围它的简单形体
假设包围和充分紧密包围着形体;
对其的测试比较简单。
常用包围盒:长方体、球、圆柱

背面剔除
外法向:规定每个多边形的外法向都是指向物体外部的。
前向面:若多边形的外法向与投影方向(观察方向)的夹角为钝角(V· N<0),称为前向面。
后向面:若多边形的外法向与投影方向(观察方向)的夹角为锐角(V· N>0),称为后向面(背面)。
后向面总是看不见的,不会由于后向面的遮挡,而使别的棱成为不可见的。因此计算时,可以把这些后向面全部去掉,这并不影响消隐结果。
空间分割技术
将投影平面上的窗口分成若干小区域;为每个小区域建立相关物体表,表中物体的投影于该区域有相交部分;则在小区域中判断那个物体可见时,只要对该区域的相关物体表中的物体进行比较即可
物体分层表示

减少场景中物体的个数,降低算法复杂度
消隐的分类
按消隐对象和输出结果分类
线消隐:消除的是物体上不可见的边。
面消隐:消除的是物体上不可见的面。
根据消隐空间分类
1️⃣ 物体空间的消隐算法:以场景中的物体为处理单元;
for (场景中的每一个物体)
{
将其与场景中的其它物体比较,确定其表面的可见部分;
显示该物体表面的可见部分;
}
假设场景中有k个物体,平均每个物体表面由h个多边形构成,显示区域中有m*n个像素,则算法的复杂度为:O((kh)*(kh))

2️⃣ 图像空间的消隐算法:以窗口内的每个像素为处理单元;
for(窗口内的每一个像素)
{
确定距视点最近的物体,以该物体表面的颜色来显示像素
}
假设场景中有k个物体,平均每个物体表面由h个多边形构成,显示区域中有m*n个像素,则算法的复杂度为:O(mnkh)

•实际应用中通常会考虑画面的连贯性,所以图像空间算法的效率有可能更高。
3️⃣ 物体空间和图像空间的消隐算法:在物体空间中预先计算面的可见性优先级,再在图像空间中生成消隐图;
代表性算法:画家算法
消除隐藏线
对造型的要求
在线框表示模型中,要求造型系统中有面的信息,最好有体的信息。
坐标变换
通过坐标变换,将视点变换到Z轴的正无穷大处,视线方向变为Z轴的负方向。
最基本的运算
线消隐中,判断面对线的遮挡关系:体分解成面,再判断面与线关系。判断过程中需反复地进行线线、线面之间的求交运算。
算法
1️⃣ 若线段的两端点及视点在给定平面的同侧,线段不被给定平面遮挡,转(7);
2️⃣ 若线段的投影与平面投影的包围盒无交,线段不被给定平面遮挡,转(7);
3️⃣ 求直线与相应无穷平面的交:
•无交点转(4);
•若交点在线段内部,交点将线段分成两段,与视点同侧一段不被遮挡,另一段在视点异侧转(4);
•若交点在线段外部,转(4)。
4️⃣ 求所剩线段的投影与平面边界投影的所有交点。若无交点,转(7)。
5️⃣ 以上所求得的各交点将线段的投影分成若干段,求出第一段中点。
6️⃣ 若第一段中点在平面的投影内,则相应的段被遮挡,否则不被遮挡;其他段的遮挡关系可依次交替取值进行判断。
7️⃣ 结束。
假设E为面F的一条边, 需判别F以外每一个面与E的遮挡关系。
假设消隐对象有n条边和m个面,当n和m很大时,两两求交的消隐方法工作量很大:
解决方法:背面剔除。
消除隐藏面(不太好出考题)
画家算法
列表优先算法:画家的作画顺序暗示出所画物体之间的相互遮挡关系。
基本思想
1️⃣ 先把屏幕置成背景色;
2️⃣ 再把物体的各个面按其离视点的远近进行排序,排序结果存在一张深度优先级表中;
3️⃣ 然后按照从远到近的顺序逐个绘制各个面。
关键是如何对场景中的物体按深度排序。
多边形排序算法
在规范投影坐标系里 XYZ 中,投影方向是 Z轴的负方向,因而 Z坐标大者距观察者更近。Zmin(P)和 Zmax(P) 分别为 P 各顶点 Z坐标的最小和最大值。[投影为正平行投影]
Step 1:将场景中所有多边形存入一个线性表,记为L;
Step 2:如果L中仅有一个多边形,算法结束;否则根据每个多边形的Zmin对它们预排序。不妨假定多边形P落在表首,即Zmin§为最小。再记Q为L–{P}(表中其余多边形)中任意一个;
Step 3:判别P, Q之间的关系,有如下二种:
对所有的Q,有Zmax§< Zmin(Q), 则多边形P的确距观察点最远,它不可能遮挡别的多边形。令L=L–{P}, 返回第二步;
存在某一个多边形Q,使Zmax§>Zmin(Q),需进一步判别:

优点:简单(如何对场景中的物体按深度排序)。
缺点:只能处理互不相交的面,且深度优先级表中面的顺序可能出错
Z缓冲区算法
组成
帧缓冲器–保存各像素颜色值;
Z 缓冲器 –保存各像素处物体深度值;
Z缓冲器中的单元与帧缓冲器中的单元一一对应
 Z缓冲器中的单元与帧缓冲器中的单元一一对应
Z缓冲器中的单元与帧缓冲器中的单元一一对应算法思想
1️⃣ 将 Z 缓冲器中个单元的初始值置为最小值。
2️⃣ 多边形投影时,当要改变某个像素的颜色值时,首先检查当前多边形的深度值是否大于该像素原来的深度值:
大于,说明当前多边形更靠近观察点,用它的颜色替换像素原来的颜色;同时更新深度值;
否则说明在当前像素处,当前多边形被前面所绘制的多边形遮挡了,是不可见的, 像素的颜色值不改变。
Z-Buffer算法()
{
帧缓存全置为背景色
深度缓存全置为最小Z值
for(每一个多边形)
{
扫描转换该多边形
for(该多边形所覆盖的每个象素(x,y) )
{
计算该多边形在该象素的深度值Z(x,y);
if(Z(x,y)大于Z缓存在(x,y)的值)
{
把Z(x,y)存入Z缓存中(x,y)处
把多边形在(x,y)处的颜色值存入帧缓存的(x,y)处
}
}
}
}
需要计算的像素深度值次数 =多边形个数*多边形平均占据的像素个数
所有图像空间算法中最简单的一种隐藏面消除算法
优点:
简单稳定,利于硬件实现;
不需要整个场景的几何数据。
缺点:
空间:需要一个额外的Z缓冲器;
时间:在每个多边形占据的每个像素处都要计算深度值。
只用一个深度缓存变量zb的改进算法:需要开一个与图象大小相等的缓存数组ZB
{
帧缓存全置为背景色
for (屏幕上的每个象素(i, j)) {
深度缓存变量zb置最小值MinValue
for (多面体上的每个多边形Pk) {
if (象素点(i, j)在Pk的投影多边形之内) {
计算Pk在(i, j)处的深度值depth;
if (depth大于zb) {
zb = depth;
indexp = k;
}
}
}
if (zb != MinValue)
在交点 (i, j) 处用多边形Pindexp的颜色显示
}
}
先像素后多边形
关键问题
1️⃣ 计算多边形 在点(i,j)处的深度。设多边形的平面方程为:

2️⃣ 判断象素点(i,j)是否在 的投影多边形之内(点与多边形的包含性检测)
射线法

由被测点P处向 y = – ¥方向作射线
交点个数是奇数,则被测点在多边形内部;
否则,偶数,在多边形外部;
若射线正好经过多边形的顶点,则采用“左开右闭”的原则来实现。
弧长法(单位圆)
–以被测点为圆心作单位圆,计算其在单位圆上弧长的代数和
代数和为0,点在多边形外部;
代数和为
2
π
2\\pi
2π,点在多边形内部;
代数和为
π
\\pi
π,点在多边形边上。

弧长累加方法:以顶点符号为基础。
将坐标原点移到被测点P。各象限内点的符号对分别为(+,+),(-,+),(-,-),(+,-)。
算法规定:若顶点pi的某个坐标为0,则其符号为+。若顶点pi的x、y坐标都为0,则说明这个顶点为被测点,我们在这之前予以排除。于是弧长变化如下表。
注意:当边的终点Pi+1在起点Pi的相对象限时,弧长变化可能增加或减少p:
扫描线Z-buffer算法[了解就行]
Z 缓冲器算法中所需要的Z 缓冲器容量较大,可以将整个绘图区域分割成若干个小区域,然后一个区域一个区域地显示,以减少Z 缓冲器的单元数;
如果将小区域取成屏幕上的扫描线,就得到扫描线 Z 缓冲器算法。
算法思想
1️⃣ 面Buffer到线Buffer;
2️⃣ 利用图形的连贯性(指深度计算);
3️⃣ 在处理当前扫描线时,开个一维数组作为当前扫描线的Z-buffer。找出与当前扫描线相关的多边形,以及每个多边形中相关的边对;
4️⃣ 对每一个边对之间的小区间上的各象素,计算深度,并与Z-buffer中的值比较,找出各象素处可见平面;
5️⃣ 确定颜色,写帧缓存:采用增量算法计算深度。
改进
1️⃣ 将窗口分割成扫描线:Z缓冲器的单元数只要等于一条扫描线内像素的个数就可以了。

2️⃣ 采用多边形Y(分类)表、活化多边形表避免多边形与扫描线的盲目求交;
3️⃣ 利用边、边的分类表、边对、活化边对表避免边与扫描线的盲目求交。
4️⃣ 利用连贯性计算深度
水平方向:当沿扫描线x递增一个像素时,多边形所在平面在z坐标的增量,对方程ax+by+cz+d=0来说,
Δ
z
a
=
−
a
/
c
\\Delta z_a=-a/c
Δza=−a/c
竖直方向
Δ
z
b
\\Delta z_b
Δzb :当沿扫描线y递增一个像素时,多边形所在平面 z坐标的增量,
Δ
z
b
=
−
b
/
c
\\Delta z_b=-b/c
Δzb=−b/c
下一条扫描线与边对左侧边交点处的深度值:
z
1
=
z
1
+
Δ
x
1
Δ
z
a
+
Δ
z
b
z_1=z_1+\\Delta x_1 \\Delta z_a+\\Delta z_b
z1=z1+Δx1Δza+Δzb

数据结构
多边形Y表; 活化多边形表(APT);边表(ET);活化边对表(AET)。
多边形Y表
存放所有多边形信息。
根据多边形顶点中最小的y坐标,插入多边形Y表中的相应位置;
根据序号可从定义多边形的数据结构中取多边形信息。(ax+by+cz+d=0的系数,多边形的边,顶点坐标和颜色

活化多边形表APT:与当前扫描线相交的多边形。
APT是一个动态的链表。

边表ET:活化多边形表中的每一个多边形都有一个边表ET(每条边端点中较大者,增量 Dx,y值较小一端的x坐标和z坐标)

活化边对表AET
在一条扫描线上,同一多边形的相邻两条边构成一个边对。活化边表AET中存放当前多边形中与当前扫描线相交的各边对的信息。


扫描线Z - buffer算法() {
建多边形y表;根据多边形顶点最小y值,将多边形置入多边形y表。
活化多边形表APT,活化边对表AET初始化为空。
For(每条扫描线i,i从小到大) {
1. 帧缓存CB置为背景色。
2. 深度缓存ZB (一维数组) 置为负无穷大。
3. 将对应扫描线i的,多边形Y表中的多边形加入到活化多边形表APT中。
4. 对新加入的多边形,生成其相应的边表。
5. 对APT中每一个多边形,若其边表中对应扫描线i增加了新的边,将新的边配对,加到活化边对表AET中。
6. 对AET中的每一对边:
6.1 对xl < j < xr 的每一个象素,按增量公式z = z + ? za计算各点depth 。
6.2 与ZB中的量比较,depth > ZB(j), 则令ZB(j) = depth,并确定颜色
值,写帧缓存。
7. 删除APT中多边形顶点最大y坐标为i的多边形,并删除相应的边。
8. 对AET中的每一个边对,作如下处理:
8.1 删除ylmax或yrmax 已等于i的边。若一边对中只删除了其中一边,
对该多边形的边重新配对。
8.2 用增量公式计算新的xl 、 xr 和zl
}
}
缺点
在每一个被多边形覆盖像素处需要计算深度值;
被多个多边形覆盖的像素需要多次计算深度值。
对比
与Z-Buffer算法相比,扫描线算法有了很大改进
优点:
将整个绘图窗口内的消隐问题分解到一条条扫描线上解决,使所需的Z-Buffer大大减少 ;
计算深度值时,利用了面连贯性,只用了一个加法 。
缺点:
每个像素处都计算深度值,甚至不止一次的计算(多边形重叠区域),运算量仍然很大。
改进
在一条扫描线上,每个区间只计算一次深度,即区间扫描线算法,又称扫描线算法
区间扫描线算法
基本思想
把当前扫描线与各多边形在投影平面的投影的交点进行排序后,使扫描线分为若干子区间。只要在区间任一点处找出在该处z值最大的一个面,这个区间上的每一个象素就用这个面的颜色来显示。
注意:该算法要求多边形不能相互贯穿,否则在同一区间上,多边形深度值的次序会发生变化。
如何确定小区间的颜色可分为三种情况
小区间上没有任何多边形,如[a4,a5],这时该小区间用背景色显示;
小区间上只有一个多边形,如[a1,a2][a5,a6]这时可以对应多边形在该处的颜色显示;
小区间上存在两个或两个以上的多边,形如[a6,a7],必须通过深度测试判断哪个多边形可见。
若允许物体表面相互贯穿时,还必须求出它们在扫描平面的交点。用这些交点把该小区间分成更小的子区间,在这些间隔上决定哪个多边形可见。如将[a2,a3]区间分成[a2,b][b,a3]两个子区间

类似于扫描线Z-Buffer算法中的数据结构
多边形分类表、活化多边形表、边表、活化边表
活化边表中的结点是边,而非边对
❓ 如何知道每一个区间中,有几个相关的多边形?是哪几个?
🏷 解决方案:活化多边形表中增加一个标志,flag=0, 每遇到它的边,flag取反。
for (绘图窗口内的每一条扫描线)
{ 求投影与当前扫描线相交的所有多边形
求上述多边形中投影与当前扫描线相交的所有边,将它们记录在活化边表AEL中
求AEL中每条边的投影与扫描线的交点;
按交点的u坐标将AEL中各边从左到右排序, 两两配对组成一个区间;
for (AEL中每个区间)
{
求覆盖该区间的所有多边形,将它们记入活化多边形表APL中;
在区间上任取一点,计算APL中各多边形在该点的深度值,记深度最大者为P;
用多边形P的颜色填充该区间
}
}
算法的优点:将逐点(象素、Pixel)计算改为逐段计算,效率大大提高!
区域子分割算法
基本思想
首先将场景中的多边形投影到绘图窗口内,判断窗口是否足够简单,若是则算法结束;否则将窗口进一步分为四块。对此四个小窗口重复上述过程,直到窗口仅为一个像素大小。此时可能有多个多边形覆盖了该像素,计算它们的深度值,以最近的颜色显示该像素即可。
何谓窗口足够简单
窗口为空,即多边形与窗口的关系是分离的;
窗口内仅含一个多边形,即有一个多边形与窗口的关系是包含或相交。此时先对多边形投影进行裁剪,再对裁剪结果进行填充;
有一个多边形的投影包围了窗口,并且它是最靠近观察点的,以该多边形颜色填充窗口。

•分离和包围多边形的判别方法:射线检查法;转角累计检查法;区域检查法(考试不考)
光线投射算法
基本思想:
1️⃣ 考察由视点出发穿过观察屏幕一象素而射入场景的一条射线,则可确定出场景中与该射线相交的物体;
2️⃣ 在计算出光线与物体表面的交点之后,离象素最近的交点的所在面片的颜色为该象素的颜色;
3️⃣ 如果没有交点,说明没有多边形的投影覆盖此象素,用背景色显示它即可。
for屏幕上的每一象素
{形成通过该屏幕象素(u,v)的射线;
for 场景中的每个物体
{将射线与该物体求交;
if 存在交点
以最近的交点所属的颜色显示象素(u,v)
else
以背景色显示象素(u,v)
}
}
光线投射算法与Z缓冲器算法相比,它们仅仅是内外循环颠倒了一下顺序,算法复杂度类似
区别在于光线投射算法不需要Z缓冲器;
为了提高本算法的效率可以使用包围盒技术,空间分割技术以及物体的层次表示方法等来加速。






![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)