排序
工业机器人(4)– Matlab Robot Toolbox运动学正、逆解
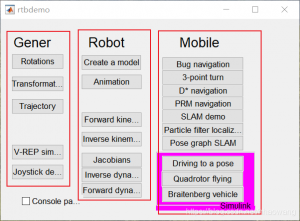
【Matlab Robotics Toolbox】robotics toolbox学习及使用记录,方便自己后面复习、改进。 基于Matlab R2019b 9.5; Peter Corke的Robotics Toolbox 10.3.1 目录 0. 前言 Robot toolbox- rt...

工业机器人(5)-串口通信技术与MODBUS协议
目录 1. 基本的通讯方式 扩展资料 串行和并行的区别 2. 串行通讯的两种方式 3. 根据传送方向分类 4. 串行通讯接口 5. RS485接口电路 6. 串口MODBUS通讯 7. MODBUS消息报文 8. MODBUS关键概...
工业机器人(6)川崎机器人仿真软件K-ROSET
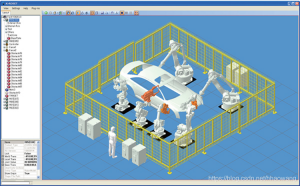
1. 机器人模拟软件 - K-ROSET K-ROSET是川崎的离线机器人模拟软件。该工具允许用户添加川崎机器人、外围设备、机器人工具及工件的3维模型到一个虚拟环境中并建立多机器人自动化工作单元。该软件...
工业机器人(8)– UART和RS-232、RS-422、RS-485通信接口
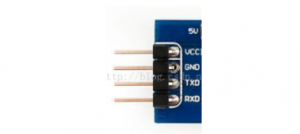
目录 一、UART是什么 二、RS-232标准 三、RS-485/ RS-422标准 四、RS-232与RS-485对比 五、RS-422与RS-485对比 六、影响RS-485总线通讯速度和通信可靠性的三个因素 七、RS-485总线的负载能力和...
工业机器人(9)– Matlab机器人工具箱之创建单臂/双臂机器人SDH/MDH方法
目录 1. Matlab机器人工具箱 2. 创建MDH单机械臂 3. 创建MDH双臂机器人 UR构型双臂 如何进行轨迹仿真 4. MDH-双臂机器人 1. Matlab机器人工具箱 官方网站Robotics Toolbox | Peter Corke 下载...
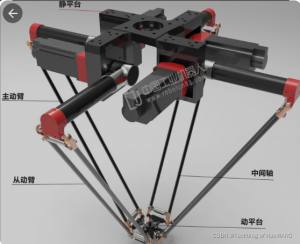
工业机器人(11)-串联机器人、并联机器人和混联机器人
机器人从机构学的角度可以分为串联机器人和并联机器人两大类。串联机器人以开环机构为机器人机构原型;并联机器人为有一个或几个闭环组成的关节点坐标相互关联的机器人。 串联机器...
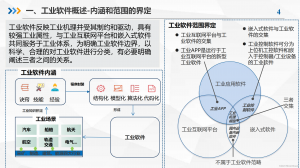
软件架构–工业软件架构分析
软件架构--工业软件架构分析 1 工业软件概述2 工业软件分类3 工业软件产业图谱4 需要解决的问题5 国外工业软件产业发展分析6 发展趋势7 工业软件架构介绍7.1 传统与新型架构碰撞与共存传统架构...

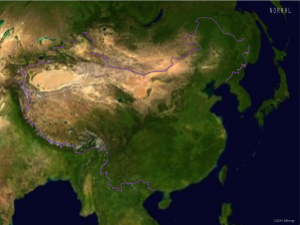
OSGEARTH3 加载一个地球
OSGEARTH3 加载一个地球 方法一: 读取*.earth文件方法二: 图层加载 方法一: 读取*.earth文件 读取*.earth文件加载,改文件格式是xml形式,每个节点代表指定的图层: FreeEart...
OSGEARTH3 加载SHP矢量文件
OSGEARTH3 加载SHP矢量文件 方法一:earth文件配置方法二:矢量图层代码 方法一:earth文件配置 在*.earth文件中增加一个图层节点,加载shp文件: <OGRFeatur...

OSGEARTH3 绘制点线面
OSGEARTH3 绘制点线面 创建点创建面地形无关的面绘制一个贴地形的区域 创建线虚线直线 3D图元绘制资源 结合OsgEarth3给的例子学习,并进行尝试后,整理的代码 osgEarth的main处初始...
OSGEARTH3 绘制热力图
OSGEARTH3 绘制热力图 OsgEarth3 的 HeatMap 例子颜色表 封装ImageLayer图层ImageLayer图层封装接口瓦片模型图像数据处理 外部调用 创建HeatmapOsgEarth3 热力图数据处理 在osgearth3的Examples...
OsgEarth3 PlacNode添加Icon图片
OsgEarth3 PlacNode添加Icon图片 osgEarth::Style pm; pm.getOrCreate<osgEarth::IconSymbol>()->declutter() = true; pm.getOrCreate<osgEarth::TextSymbol>()->halo()...